
In Boston—mainly Cambridge—it is not out of the ordinary to see a team of Draper engineers analyzing traffic patterns, sampling water from the harbor or testing their latest sensor on the Draper autonomous vehicle. So, when Draper engineers, including Joseph Hollmann and Lucas Benney, camped out on the bank of the Charles River with their LiDAR test setup at 5:00 a.m., not even the first rower questioned them. For the past year, Joseph and his team have run tests from a river bank, a dock on the Charles, an off-season hockey rink, one toasty greenhouse, the diving platform of a pool, a corn field, snow and ice-covered soccer fields, and the roof of Draper. At each location, they tested their LiDAR technology at different distances and in more adverse weather conditions.
Hemera is not a LiDAR system, however. It is a detection software that augments existing LiDAR technologies, making those systems more robust for autonomous vehicles that use LiDAR to measure distance to objects. Today’s self-driving cars use this technology to differentiate objects—telling the difference between a fire hydrant and a toddler—but the current state-of-the-art cannot see through difficult weather conditions like fog, rain or snow.
Like many innovative Draper capabilities, Hemera was developed out of the Internal Research and Development (IRaD) program. Joseph Hollmann, the principal investigator for Hemera, knew that an inclement-weather detection architecture for LiDAR didn’t exist, but that there may be a solution lying in his biomedical optics background. He set out to develop a solution by applying for IRaD funding and within 9 months had a working device that could see through dense fog at about 60 meters. In-house LiDAR expert Steven Spector, a principal member of Draper technical staff, points out that this rapid prototyping is especially impressive because
“[Joseph] was trying to take an image processing technique typically used in biology and apply it to LiDAR detection. However, utilizing a tool attached to a table-top microscope is very different than implementing it on a moving vehicle.”
Lucas Benney, a member of the technical staff, previously worked with Steven Spector on a cutting-edge LiDAR system and recently joined the Hemera team. To prove the robustness of Hemera, he’s been running numerous field tests with Joseph. Just a few weeks ago, the two engineers beamed their augmented LiDAR system 200 meters across the Charles River in rainy conditions. To date, this was the longest field test they had run, and the detection scheme proved to be effective.
“We had laser-like focus on our goal, which was to be able to see through fog, rain and snow. We did not need to become experts in lasers; we only needed to worry about the detection architecture.” – Joseph Hollmann
By leveraging off-the-shelf parts, Joseph and his team have been able to rapidly make progress developing this technology for current LiDAR systems. In addition to proving Hemera’s functionality at far distances, another test proved Hemera can accurately image photographs.
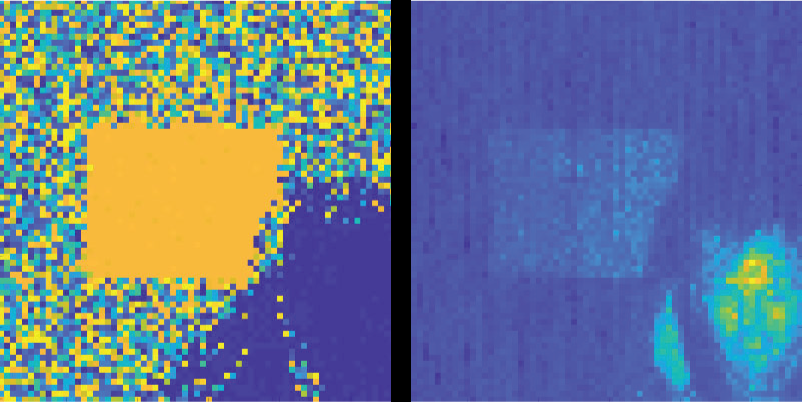
Today’s commercial LiDAR systems have to choose between range, time, laser power and reflectivity. For example, when a laser pulse is sent out, only a single photon can be detected per image pixel, which is not enough data to create an image. Hemera does not have to choose, meaning that Draper’s detection architecture can receive the entire reflected signal—more than three orders of magnitude more photons per laser pulse. This presents an image like the below.

Joseph Hollmann’s team has made leaps and bounds developing this all-weather detection scheme for any LiDAR system and with each new field test, they deliver new results. Do not be surprised if you find Joseph and Lucas conducting field tests in the first snow of the year—winter is coming—proving that Hemera is more robust than ever.
